About us
We are the Robotics, Evolution and Artificial Life Laboratory, based at the IT University of Copenhagen. Our vision is to do research on the border between fiction and fact, to create new, feasible solutions for the society of tomorrow. The lab has an interdisciplinary experimental practice and explores what-if scenarios using fundamental science and engineering to work towards the realization of these scenarios. Academically, the group is rooted in artificial intelligence with specific interests in robotics and evolutionary computation, but generally the research agenda is driven by opportunities arising both within science and in society.
Projects
iNNk
An online, multiplayer, neural network based game. Try out the game and see if your team can communicate safely without the neural network’s comprehension.

Open-Ended Evolution
Evocraft (Evolution + Minecraft) - A python framework for open-endedness research with Minecraft

Safety and Life-long Reinforcement Learning
Making Reinforcement Learning solve tasks safely
BIG-MAP
Battery Interface Genome - Materials Acceleration Platform
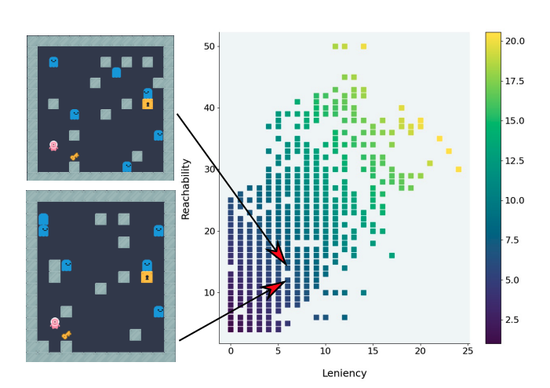
Dynamic Difficulty Adjustment
Using Bayesian modelling to adapt content to users

EMERGE
Easy Modular Embodied Robot Generator

EvoBliss
Technological Evolution of Synergy Between Physicochemical and Living Systems

Flora Robotica
Developing and investigating symbiotic relationships between robots and natural plants, to produce architectural artifacts and living spaces

Mozart
Autonomous manipulation and soft robots for food packaging.
Meet the group
Professors
Andrés Faíña
Associate Professor
Modular Robots, Evolutionary Robotics, Liquid Handling Robots, Automatic Design of Robots
Djordje Grbic
Associate Professor
Machine Learning in Operations Research, Safe Reinforcement Learning, Reinforcement Learning
Kasper Støy
Full Professor
Modular robots, Lab automation, Multi-robot systems, Swarm robotics, Evolutionary robotics, Robot learning, Unconventional robots (braid robotics)
Morten Roed Frederiksen
Assistant Professor
Context comprehension in robotics, Socially assistive robots, Human-robot interaction, Reinforcement learning, Synthetic emotions, Agentic LLM control architectures for robotics
Payam Zahadat
Associate Professor
Swarm robotics, Evolutionary robotics, Collective intelligence, Bio-inspired computation, self-organizing systems, Complex systems
Rodrigo Moreno
Assistant Professor
Modular Robots, Artificial Intelligence, Emergence, Lab Automation, Evolutionary Robotics
Sebastian Risi
Full Professor
Neuroevolution, Neural networks, Evolutionary algorithms, Evolutionary robotics, Generative and developmental systems, Procedural content generation, Game AI, Computational intelligence
Postdocs
Elias Najarro
Postdocs
Self-organizing systems, Neuro-inspired ML, Evolutionary Computation, Meta-Learning, Open-Endedness
Joachim Winther Pedersen
Postdoc
Evolved Plastic Artificial Neural Networks, Qualitiy Diversity, Computational Neuroscience, Meta-learning, Indirect Encoding
Milton Montero
Postdoc
Compositional Generalisation, Human and Computer Vision, Neuro-Symbolic Systems, Embodied Cognition, Self-Organization, Neuro-Evolution, Causal Discovery, Reasoning and Planning
Nicolas Bessone
Postdoc
Artificial Intelligence, Bio-inspired Computation, Collective Behavior, Decentralized System, Emergence, Evolutionary Algorithms, Evolutionary Robotics
Timothée Anne
Postdoc
Evolutionary algorithms, Evolutionary robotics, Multi-task learning, Lifelong learning, Adaptation
PhD Students
Bailey Dacre
PhD Student
Modular Robotics, Soft Robotics, Decentralized Systems, Evolutionary Robotics, Bio-inspired Computation
Kathrin Korte
PhD Student
Cognitive Science, Multi-Agent Systems, Causality, Reinforcement Learning, Network Science
Marcello Barylli
PhD Student
Biological Complexity, Collective Intelligence, Reinforcement Learning, Diffusion, Network Science
Pratik Suresh Ingle
PhD Student
Swarm Robotics, Collective Behaviour, Multi-agent Systems, Evolutionary Robotics, Bio-inspired Computation, Reinforcement Learning
Recent Publications



Spinoff Companies

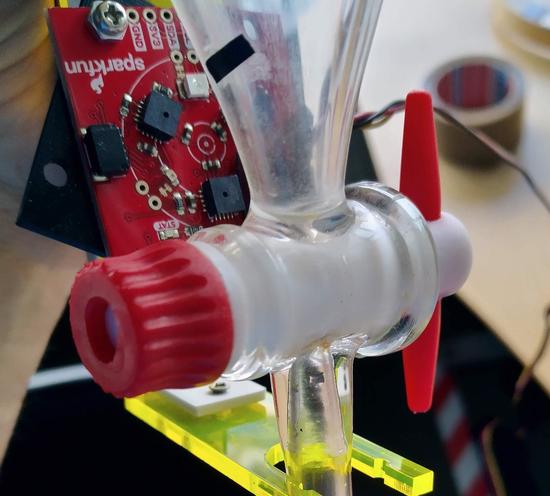
Flow Robotics
Flow Robotics produces flexible and user-friendly liquid handling robots for automation of pipetting tasks in laboratories.

modl.ai
Headquartered in Denmark, modl.ai is a team of game developers, engineers and AI experts working together to create AI-driven tools for building better games.
Find us
Address
Rued Langgaards Vej 7
2300 København S
Danmark
Our offices are located at Emil Holms Kanal, 2F18.
Our Lab is located at RLV 7, 5A20/22.